
本記事3行要約:
● 「ロボティクスと機械学習の融合」がカンファレンス全体のテーマ
● まだ歴の若い会議ながらICRA・IROSに並ぶ注目のロボティクスカンファレンス
● 日本人研究者の採択実績は過去3年間で14名のみ
トップカンファレンス定点観測シリーズ vol.12、「CoRL」です。
これまでトップカンファレンス定点観測シリーズでは、基本的にカンファレンスランクのTop100にランクインするような国際会議について詳細を分析し公開してまいりました。しかし、今回ピックアップするCoRL (Conference on Robot Learning) はそこには入っておりません。理由は後述いたしますが、ロボティクス分野の注目すべき学会として、この度、CoRLの現状について調査してみました。
CoRL2023 開催概要
▶ 開催期間: 6-9 Nov., 2023
▶ 開催都市: Atlanta, GA
▶ 公式HP: https://www.corl2023.org/
■なぜCoRL?
これまで、ロボティクス分野における最高峰の会議として、ICRA(International Conference on Robotics and Automation)とIROS(International conference on Intelligent Robots and Systems)の2つを取り上げてきました。しかし近年、この分野には新たな潮流として台頭してきた学会があります。それがCoRL(Conference on Robot Learning)と呼ばれる学会です。
表記の通りロボット学習に関する学会という意味ですが、実際この会議は、機械学習とロボティクスを結びつけることを目標として、Google DeepMindの研究者を中心に立ち上げられ、2017年に米国カリフォルニア州マウンテンビューで初回開催されました。以降、毎年開催されており、2023年の第7回は、11月6-9日の日程で、米国ジョージア州アトランタでの開催でした。
初回開催から7年が経ち、徐々にビジビリティも上がってきましたが、Google Scholarにおけるカンファレンスランクなどの指標としているh5-indexは、過去5年間に発表された論文のh指数ですので、歴史が浅い会議や規模が小さな会議にとっては不利な指標となります。
規模的には、ICRA2023が論文数1,345本でCoRL2023が199本でしたので、ICRAはCoRLのおよそ6.8倍の大きさです。このような中で、2024/1/3現在、CoRLのh5-indexでは76で、ICRAは119です。単純計算では、ICRAと規模が同程度になれば、76×6.8で500以上のh5を記録してもおかしくないレベル感ということができます(実際にはその様にスケールしないと思いますので言い過ぎではありますが)。
出力が身体性を伴う物理的な機械であることを考えると、AI分野の中でもとりわけホットになりつつある汎用人工知能(AGI)を支える重要な技術という考え方もできます。そのような意味で、現状のカンファレンスランク的には最高峰という数値ではないのものの、今後重要になる技術分野と考え、こちらで取り上げることにしました。
■CoRL2023総評
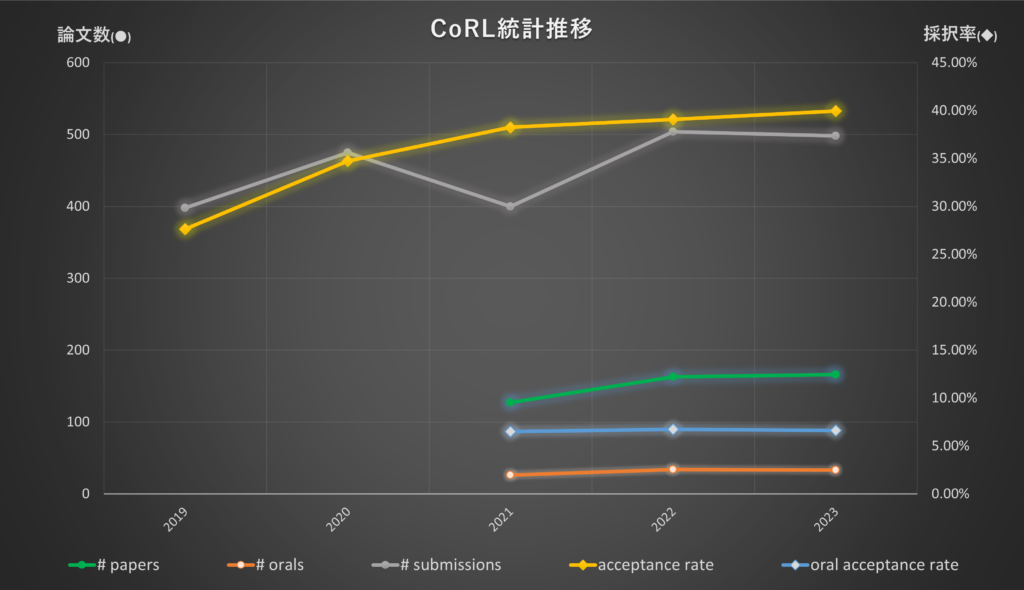
下記の推移表でも示しますが、CoRL2023では、論文投稿:498本、採択:199本となっており、採択率:39.96%という結果でした。採択論文の内訳は、166本がポスター(Poster)、33件が口頭(Oral)発表です。Oralだけで言えば、6.62%の採択率となり、かなりの難関会議であることが分かります。
その他の公開されているCoRL2017-2023の統計を見てみると表1のようになります。学会設立当初の数値は残念ながら抽出できませんでしたので、ブランクとしております。
全体的に見ると、論文数自体は400本程度から500本程度に増加していますが、他のAI関連分野と比較すると爆発的に増えているような気配はありません。また、採択率は安定して40%以下を維持しているようです。
| Year | #submissions | #accepted papers | #papers | orals | acceptance rate | oral acceptance rate |
venue |
|---|---|---|---|---|---|---|---|
| 2017 | Mountain View, CA | ||||||
| 2018 | Zürich, Switzerland | ||||||
| 2019 | 398 | 110 | 27.64% | Osaka, Japan | |||
| 2020 | 475 | 165 | 34.74% | Virtual | |||
| 2021 | 400 | 153 | 127 | 26 | 38.25% | 6.50% | London, UK & Virtual |
| 2022 | 504 | 197 | 163 | 34 | 39.09% | 6.75% | Auckland, NZ |
| 2023 | 498 | 199 | 166 | 33 | 39.96% | 6.63% | Atlanta, GA |
表1 CoRL論文投稿数および採択率
■日本人研究者の活躍
他の定点観測シリーズと同様に、日本人研究者がCoRLでどれだけ活躍されているのか調査してみました。
2021 -2023年で計測した結果、トップは累積4件採択で、Masayoshi Tomizuka氏(UC Berkeley)でした。Tomizuka氏は、2022年 2件・2023年 2件と採択されておりました。
次いで、Ayano Hiranaka氏(スタンフォード大学)が、CoRL2022・2023とそれぞれ1本ずつ採択という結果です。
| 開催年 | 採択数 | 日本人著者 を含む論文 |
日本人著者が 絡む論文比率 |
全著者数 | 日本人 著者数 |
日本人 著者比率 |
|---|---|---|---|---|---|---|
| 2017 | ||||||
| 2018 | ||||||
| 2019 | 110 | |||||
| 2020 | 165 | |||||
| 2021 | 153 | 2 | 1.3% | 758 | 2 | 0.3% |
| 2022 | 197 | 3 | 1.5% | 1,014 | 3 | 0.3% |
| 2023 | 199 | 11 | 5.5% | 1,111 | 13 | 1.2% |
表2 CoRL投稿論文全体の著者数に占める日本人比率の推移
| 著者 | 採択数 |
|---|---|
| Masayoshi Tomizuka |
4
|
| Ayano Hiranaka |
2
|
| Eisuke Hirota |
1
|
| Haruki Nishimura |
1
|
| Heiga Zen |
1
|
| Kensuke Nakamura |
1
|
| Kentaro Oguchi |
1
|
| Masahiro Ono |
1
|
| Noriaki Hirose |
1
|
| Shinjiro Sueda |
1
|
| Shuhei Ikemoto |
1
|
| Takeru Oba |
1
|
| Takuma Yoneda |
1
|
| Tatsuya Harada |
1
|
図2 CoRL2021-2023日本人研究者の採択件数
CoRL論文は色々な場所で公開されておりますが、PMLRのサイトでは、CoRL2017以降全ての論文が閲覧できるようです。ただし、最新のCoRL2023については、まだ掲載されていなかったため、公開査読システムであるOpenReviewの結果から解析してみました。OpenReviewシステムで査読されるようになったのは、2021年からのようでしたので、そこからの統計を上記の表2に出しております。
国内では、機械学習とロボティクスが交わる領域を攻めるような研究室が少なかったのか、もしくはCoRLに対する関与が少なかったこともあってか、日本からはまだそこまで多くの論文が発表されている状況ではありませんでした。それでも2022年に比べれば2023年は大幅に増加したと言えるでしょう。
機械学習とロボティクスの融合分野に強い研究組織は国内でも、例えば、AIST・ATR・東京大学 松尾研究室・NAIST 松原研究室・早稲田大学 尾形研究室・慶應義塾大学 杉浦研究室・大阪大学 原田研究室などがあります。もちろん他にもこの分野で活躍されている研究組織は多くありますので、CoRLへの貢献も今後増えていくものと予想されます。
■CoRL2023 論文賞(Award)
ICRA2023定点観測記事でも紹介した通り、ロボット分野では、実機を動かしたりデモを公開しているケースが多く見られます。特にCoRLでは、論文投稿要件として実機での実験報告もしくはシミュレーション実験が実機に移行できることを示すよう明確に定義されています。
"Authors are encouraged to report real-robot experiments or provide convincing evidence that simulation experiments are transferable to real robots."
*CoRL, Call for Papersより
可能な範囲で、論文賞とともに各研究のデモなどもまとめてみました。
■Best Paper:
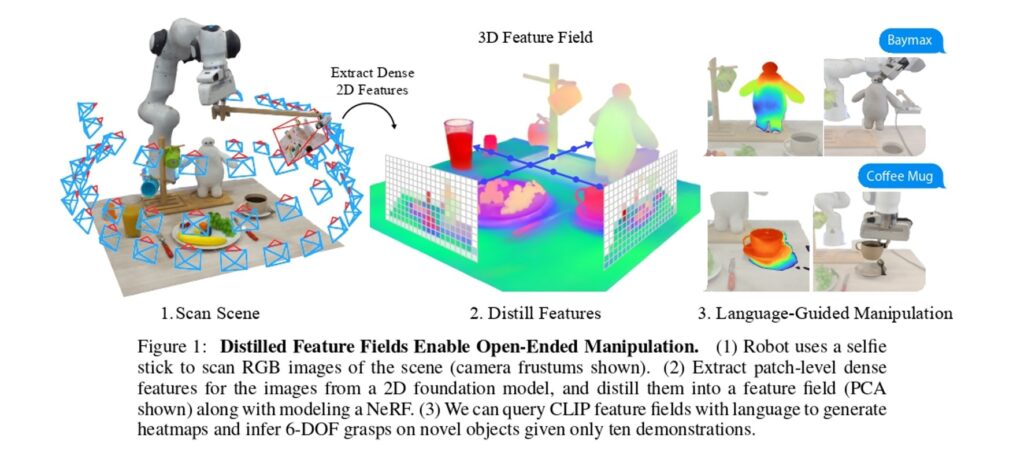
[Title] Distilled Feature Fields Enable Few-Shot Manipulation
[Authors] William Shen, Ge Yang, Alan Yu, Jensen Wong, Leslie Pack Kaelbling, Phillip Isola
[Paper URL] https://arxiv.org/pdf/2308.07931.pdf
[Team HP] https://f3rm.github.io/
[Code] https://github.com/f3rm/f3rm
最優秀論文賞は、この分野で名門のMIT CSAIL(シーセル)のKaelbling氏の研究室からの論文でした。
ユーザーから把持する対象をテキストで受け、グラスピングする対象の3D構造を理解しつつロボットで把持させる方法を提案したものです。特定の対象のみならず、任意の対象をロボットに把持するように指示することが可能です。このために、まず作業環境をRGBカメラ(=2D)で多数撮影し得られた画像特徴から画像基盤モデルを用いて3Dの立体を推定します(NeRF)。この表現をDistilled Feature Fieldと呼んでいます。また、言語指示からCLIPを用いて対象の画像特徴を推定し、言語指示により把持対象の3D構造を推定し、対象を把持できるようにしています。コンピュータビジョンにおける最新の成果をうまく活用した方法といえます。
■Best Student Paper:
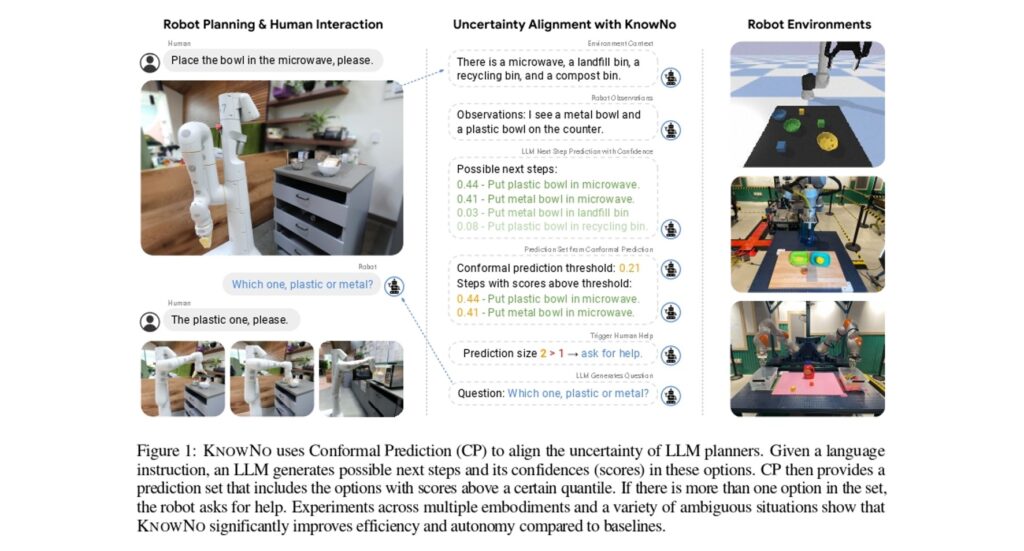
[Title] Robots That Ask For Help: Uncertainty Alignment for Large Language Model Planners
[Authors] Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar
[Paper URL] https://arxiv.org/pdf/2307.01928.pdf
[Team HP] https://robot-help.github.io/
[Code] https://github.com/google-research/google-research/tree/master/language_model_uncertainty
最優秀学生論文賞は、ロボットが大規模言語モデル(LLM)に基づいてプランニングをする際に、間違った予測を防ぐために、LLMの不確実性を評価し、確実性がないときには人間の支援を呼ぶことを提案したものです。このフレームワークを”KnowNo”と呼んでいますが、まさにソクラテスや孔子が言った「無知の知」を実現するための方法論です。LLMに次のステップの予測と確信度を生成させた上で、複数の選択肢を絞り込むことができなければ、人に助けを求めるような流れになっています。
■Best System Paper:
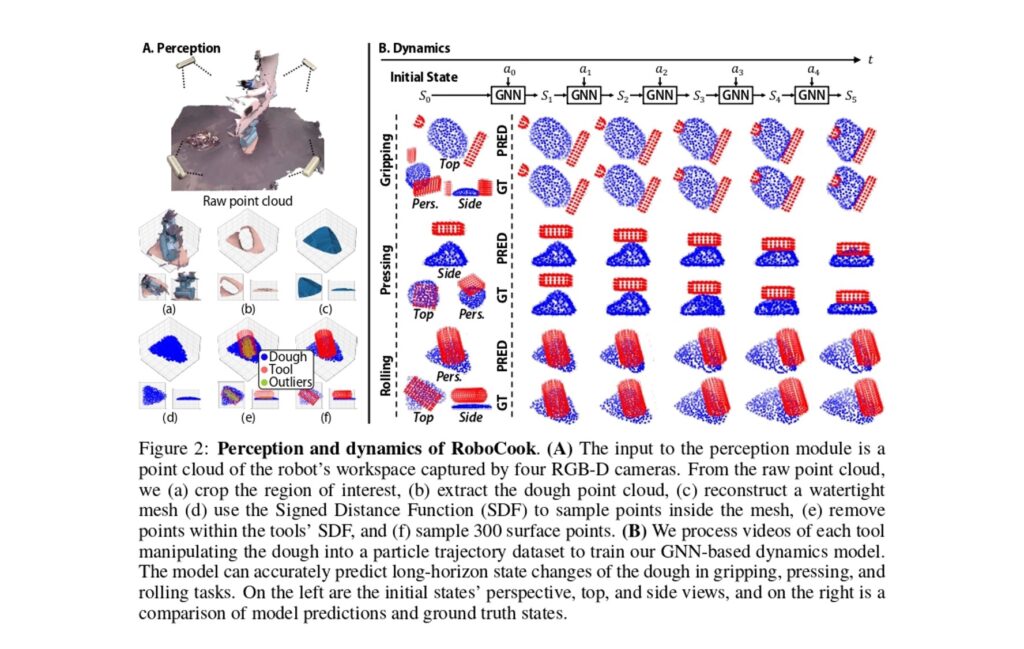
[Title] RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools,
[Authors] Haochen Shi, Huazhe Xu, Samuel Clarke, Yunzhu Li, Jiajun Wu
[Paper URL] https://arxiv.org/pdf/2306.14447.pdf
[Team HP] https://hshi74.github.io/robocook/
[Code] https://github.com/hshi74/robocook
ロボットに料理をさせるということは、可変形状の対象のマニピュレーションや、長期目線の動作計画、ツールを利用するスキル獲得といった、昨今のロボティクス技術でも依然として大きな課題になっている部分にアプローチしなければいけません。
この論文では、これらを解決するために、対象とツールの関係性を学習したグラフニューラルネットワークを、点群ベースのモデル識別器と組み合わせて最適ツール選択を実現し、シミュレーションデータで様々なスキルを自己教師的に学習するフレームワークを提案しています。
その他、惜しくも受賞は逃したものの、ファイナリストに残った発表についても公式HP Awardから確認できます。
■まとめ
今回は初めて、カンファレンスランクに載っていない、これから伸びるであろう成長著しい会議を取り上げてみました。
全体を通じて、旧来のロボティクスの枠を超え、コンピュータビジョンや言語モデルなどの特に進展が目覚ましいAI分野をうまく取り込んだものが、論文賞として取り上げられている感じがしました。今後もこの流れがどんどんと進み、生成AIの出力モダリティーの一つとしてのロボティクス分野がしっかりと確立されてくることでしょう。来年以降の成長が楽しみな会議です。
尚、産総研オートメーション研究チーム・コンピュータビジョン研究チーム・AIST-CNRSロボット工学連携研究ラボを中心としたメンバーの皆さまが、CoRL2023全論文199本を完全読破した論文サマリと本会議の動向などをまとめられております。本記事のいくつかの箇所においても、作成の参考にさせていただきました。この場を借りて御礼申し上げます。
▶ CoRL2023速報 https://speakerdeck.com/rpc/corl2023su-bao

● ResearchPortメンバーシップ募集:
https://research-p.com/?memberpage=registration
ResearchPortでは、研究者・技術者の方の研究事業開発サポートやキャリアサポートサービスを提供しております。ご興味がある方はResearchPortメンバーシップへご登録下さい。
編集:ResearchPort事業部
■Contact
本記事に関する質問や、ご意見・ご要望などがございましたらResearchPortまでお問い合わせください。
https://research-p.com/contactform/
-
2026年4月23日
「ICLR 2026」ResearchPortトップカンファレンス定点観測 vol.21


