
本記事3行要約:
● ロボット最高峰の国際学会が2022年は日本(京都)で開催された
● 日本発の国際学会であり、日本人研究者の貢献比率が他分野に比べ大きい
● AIとの融合もあり、論文数が緩やかに増えてきている
学術界各分野の最高峰の会議を俯瞰するトップカンファレンス定点観測シリーズvol.6では、ロボティクス分野最高峰の会議の一つであるInternational Conference on Intelligent Robotics and Systems(=IROS)を見ていきましょう!ロボット分野のトップカンファレンスでは、ICRA(International Conference on Robotics and Automation)もあり、それと双璧をなす大きな国際会議です。
IROS 2022 開催概要
▶ 開催期間: 23-27 Oct., 2022
▶ 開催都市: KYOTO, JPN
▶ 公式HP: https://iros2022.org/
■IROSとは
IROSは、IEEEとRSJ(日本ロボット学会)の共催国際会議であり、日本人研究者も多数運営に加わっています。1988年に東京で開催された第1回以降、しばらくは日本での開催が多く、運営も日本側から積極的に関与し今に続いています。近年、日本開催は少なくなっていましたが、IROS2022では、2013年以来の日本(京都)開催となりました。
それでは、実際にIROSの中身を見ていきましょう。
“ロボティクス”と一言に言っても、ロボットの形式から、そこで必要とされる要素技術は非常に多岐にわたります。それを反映して、ロボット分野の会議では、全体を把握するのが困難なほど多様な分野を含んでいます。
プログラム* をみると、新たなセンサ素子、ロボットの視覚・触覚、ロボット制御、そのための学習、シミュレータ、ロボットプログラミングの簡略化、ロボットアーム/レッグ/ハンドなどメカの構造や駆動メカニズム、飛行ロボット・モバイルロボット、生産システムなどなど……応用分野に至るまで、非常に幅広い体系になっていることがわかります。
*Start browsing the Program at a Glance をクリックの上で、上のメニューで適当な曜日を選べばセッションが見られます。日曜日は、ワークショップ・チュートリアル等で、月曜日から本会議が始まります。
■IROSで扱われている技術領域
産業用ロボットが発明されたころから、ロボットに複雑な物体操作(manipulation)をさせることは非常に重要なテーマです。中でも様々な物体を把持することは基本中の基本ですが、これらのトピックスは今でも大きな課題であり研究が続けられています。また、乱雑に置かれた物体をうまく操作させたり、環境の中で動いたり飛び回ったりするためには、ロボットの目が重要になるため、コンピュータビジョン技術による物体検出やSLAM、それによるビジュアルサーボなども大きな研究分野になっています。
これらをうまく統合した、いわば頭脳にあたるAIも重要で、ロボットの動作計画にはじまり、機械学習、特に強化学習の研究が進んでいます。当然、新たな機構や人や環境と接触できるような柔軟なロボット、新たなセンシングメカニズムなど、ハードウェアとその設計・モデリングも重要です。これらを組み合わせた産業応用テーマとして、生産の自動化や医療への応用も、セッションとなっています。
近年では、遠隔ロボットやサービスロボット、宇宙ロボットなども多く、セッション名にもなっていたりします。
表1に、IROS2022のセッションをまとめてみました。合計193ものセッションがありますが、それぞれを大きな分野で分類しています。11分類に項目分けし、内訳は、AI・学習[AI]、制御[Control]、物体操作[Manipulation]、センシング[Sensing]、人機械システム[HRI]、インタフェース[Interfaces]、機構[Mechanism]、特定用途のロボットハードウェア[Applied robots]、ロボット応用システム[Applied robotics]、ロボット安全担保[Safety]、シミュレーション[Simulation]としてみました。各分類のセッション数は図1に示した通りです。(実際には特定のロボットの形式に特化した制御技術などもあり、分類は完全にはできないのですが……)
| Topics | Sessions |
|---|---|
| AI | 54 |
| Applied robotics | 23 |
| Applied robots | 27 |
| Control | 14 |
| HRI | 10 |
| Interfaces | 5 |
| Manipulation | 13 |
| Mechanism | 13 |
| Safety | 3 |
| Sensing | 30 |
| Simulation | 1 |
| Sum | 193 |
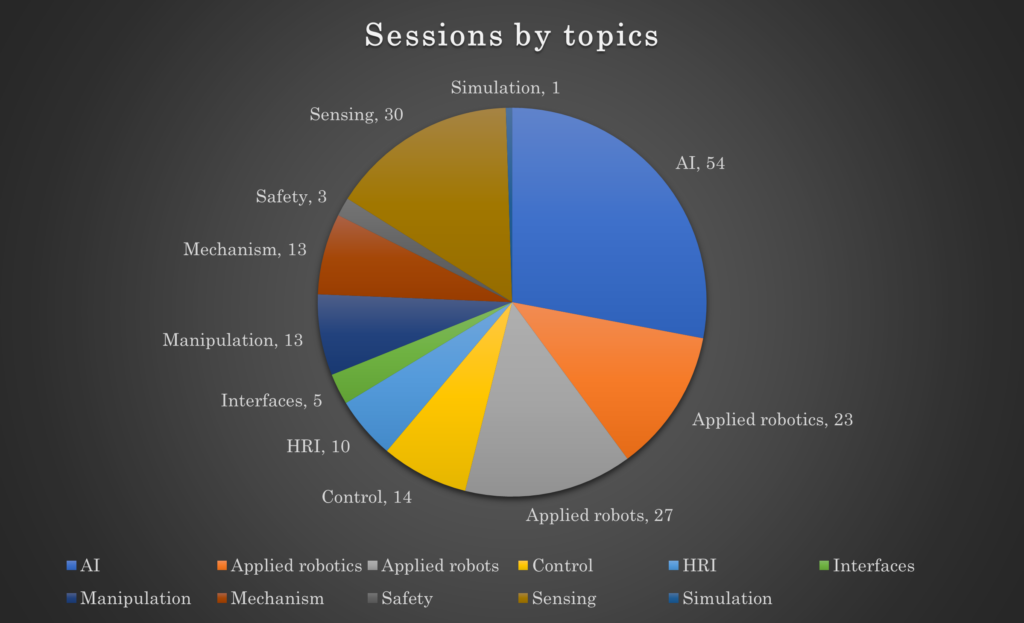
結果的には、予想通り、機械学習を含む[AI]関連が相当な割合を占めることがわかりました。やはりロボティクスでもAIが重要になりつつあるようです。次いでロボット応用システムや、各分野に特化したロボット機構などで50ほどのセッションがありますが、中身は多様なので一体感がある感じはないかもしれません。また、機構に関しては13セッションあり、これらもロボットハードウェアという意味では関連するかもしれません。制御に関しては14セッション、物体操作は13セッション、人機械協調やインタフェース関連は合わせて15セッションほどあり、これらを合わせると、大きなロボット制御の塊感があります。センシング関連は30セッションあり、中には視覚関連や力触覚・聴覚関連が含まれています。
193の全セッションタイトルは、以下の表2に示す通りです。参考にしてください。
| Session Title | Sub-field | # Session |
|---|---|---|
| Motion and Path planning | AI | 9 |
| Reinforcement learning | AI | 5 |
| Learning | AI | 2 |
| Machine learning for robot control | AI | 2 |
| Whole-body motion planning and control | AI | 2 |
| Planning under Uncertainty | AI | 1 |
| Collision avoidance | AI | 1 |
| Imitation learning | AI | 1 |
| Path planning for multiple mobile robots and agents | AI | 1 |
| Transfer learning | AI | 1 |
| Task planning | AI | 1 |
| Learning from experience | AI | 1 |
| Deep learning methods | AI | 1 |
| AI-enabled robotics | AI | 1 |
| Multi-contact whole-body motion planning and control | AI | 1 |
| Autonomous agents | AI | 1 |
| Constrained motion planning | AI | 1 |
| Representation Learning | AI | 1 |
| Learning from demonstrations | AI, Interfaces | 3 |
| SLAM | AI, mobile robots | 8 |
| Localization | AI, mobile robots | 6 |
| Mapping | AI, mobile robots | 4 |
| Space robotics and automation | Applied robotics | 1 |
| Aerial systems | Applied robotics, aerial robots | 7 |
| Robotics in agriculture and livestock farming systems | Applied robotics, Agriculture | 1 |
| Robotics and automation in agriculture and construction | Applied robotics, Agriculture, Construction | 2 |
| Factory automation and logistics | Applied robotics, FA | 1 |
| Industrial and Parallel robots | Applied robotics, FA | 1 |
| Intelligent transportation systems | Applied robotics, ITS | 2 |
| Multi-robot systems | Applied robotics, Multi-agents | 3 |
| Distributed robot systems | Applied robotics, Multi-agents | 1 |
| Swarm robotics | Applied robotics, Multi-agents | 1 |
| Soft robot applications | Applied robotics, Soft robots | 1 |
| Telerobotics and teleoperation | Applied robotics, Telerobotics | 2 |
| Field robots | Applied robots | 1 |
| Service robotics | Applied robots | 1 |
| Assembly and Additive manufacturing | Applied robots | 1 |
| Human and humanoid motion analysis and synthesis | Applied robots, Humanoid | 1 |
| Humanoid and Bipedal locomotion | Applied robots, Humanoid | 1 |
| Humanoid robot systems | Applied robots, Humanoid | 1 |
| Marine Robotics | Applied robots, Marine robots | 2 |
| Field and marine robotics | Applied robots, Marine robots | 1 |
| Medical robots and systems | Applied robots, Medical robots | 7 |
| Micro/Nano robots | Applied robots, Micro robots | 1 |
| Automation and robotics at micro-nano scales | Applied robots, Micro robots | 1 |
| Climbing and wheeled robots | Applied robots, Mobile robots | 1 |
| Cellular, modular and cooperating robots | Applied robots, Modular robots | 1 |
| Soft robot material and design | Applied robots, Soft robots | 2 |
| Soft sensors and actuators | Applied robots, Soft robots | 2 |
| Prosthetics and Exoskeletons | Applied robots, Wearable robots | 2 |
| Wearable robotics | Applied robots, Wearable robots | 1 |
| Compliance and impedance control | Control | 2 |
| Optimization and Optimal control | Control | 2 |
| Motion control | Control | 1 |
| Model learning for control | Control | 1 |
| Control for legged robot | Control | 1 |
| Robust/adaptive control | Control | 1 |
| Behavior-based systems | Control | 1 |
| Formal methods in robotics and automation | Control | 1 |
| Visual servoing | Control | 1 |
| Soft robot modeling and control | Control, Soft robots | 3 |
| Human-centered robotics | HRI | 3 |
| Computational advances in human-robot interaction | HRI | 2 |
| Rehabilitation robotics | HRI | 1 |
| Physical human-robot interaction | HRI | 1 |
| Social HRI | HRI | 1 |
| Human factors and human-in-the-loop | HRI | 1 |
| Human-robot collaboration | HRI | 1 |
| Virtual reality and interfaces | Interfaces | 1 |
| Brain-Machine interfaces and natural language interaction | Interfaces | 1 |
| Intention recognition | Interfaces | 1 |
| Software, middleware and programming environments | Interfaces, Programming | 2 |
| Manipulation systems | Manipulation | 6 |
| Grasping | Manipulation | 4 |
| Intelligent and flexible manufacturing | Manipulation | 1 |
| Art and entertainment and manipulation | Manipulation | 1 |
| Bimanual and in-hand manipulation | Manipulation | 1 |
| Biologically-inspired robots | Mechanism | 5 |
| Mechanism design | Mechanism | 3 |
| Legged robots | Mechanism | 3 |
| Tendon driven mechanisms | Mechanism | 1 |
| Actuation and joint mechanisms | Mechanism | 1 |
| Robot safety | Safety | 1 |
| Safety in HRI | Safety | 1 |
| Calibration and robot safety | Safety | 1 |
| Sensor fusion | Sensing | 2 |
| Recognition | Sensing | 1 |
| Robot audition | Sensing | 1 |
| Sensor systems | Sensing | 1 |
| Contact modeling and force/tactile sensing | Sensing, force/tactile sensing | 1 |
| Haptics | Sensing, force/tactile sensing | 1 |
| Force and tactile sensing | Sensing, force/tactile sensing | 1 |
| Navigation systems | Sensing, mobile robots | 7 |
| Object detection, segmentation and categorization | Sensing, vision | 3 |
| Computer vision for automation | Sensing, vision | 2 |
| Semantic scene understanding | Sensing, vision | 2 |
| Deep learning for visual perception | Sensing, vision | 2 |
| Visual tracking | Sensing, vision | 1 |
| Vision | Sensing, vision | 1 |
| RGB-D perception | Sensing, vision | 1 |
| Data sets for robotic vision | Sensing, vision | 1 |
| Computer vision for transportation | Sensing, vision | 1 |
| Visual Learning | Sensing, vision | 1 |
| Simulation and animation | Simulation | 1 |
表2 IROS2022 全193セッションタイトル
■IROS2022総括
分野全体の傾向が見えてきたところで、ここからは論文数がどのように変化しているか、日本からの論文数がどのように推移しているかを見てみたいと思います。これまでの手法と同様に、論文サイトのデータを解析し、日本人らしい名前を抽出してみました。その結果は、表3に示したとおりです。なお、論文数まとめはIEEEの論文集カバーページの他、産総研のまとめサイトも参考にさせていただきました。論文数については、Paperceptのプログラムサイトから抽出しています。
IROSでは論文投稿時にIEEE Robotics and Automation Letters(RA-L)論文への査読も兼ねたオプションも選べるようになっており、投稿数がIROSのみなのかRA-Lも含めたものなのか、少しわかりにくくなっています。そのため、全投稿数と全採択数で計算しています。RA-L分も含んでいるので多少数値が異なる点もあり、他の統計と相違している部分もありますが、誤差の範囲のずれかと思います。
注)判定に引っかからず抜けてしまっている著者の方がいらっしゃれば申し訳ありません。また所属機関が日本にない場合や、日本の機関であっても海外のお名前を持たれていると判定された方は含まれない可能性があります。
| Year | Venue | #submissions | #papers | acceptance rate | JPN paper | JPN paper rate |
|---|---|---|---|---|---|---|
| 2017 | Vancouver, Canada | 2164 | 970 | 44.8% | 107 | 11.03% |
| 2018 | Madrid, Spain | 2700 | 1254 | 46.4% | 142 | 11.32% |
| 2019 | Macau, China | 2494 | 1131 | 45.3% | 165 | 14.59% |
| 2020 | Las Vegas, USA | 2996 | 1469 | 49.0% | 190 | 12.93% |
| 2021 | Prague, Czech Repub. | 2801 | 1301 | 46.4% | 139 | 10.68% |
| 2022 | Kyoto, Japan | 3579 | 1765 | 49.3% | 195 | 11.05% |
表3 論文数投稿数・採択率と日本からの貢献
これをみると、投稿数(submissions)は緩やかに伸びている傾向が見てとれますが、各年の企画によるのか、必ずしも単調増加ではなく増減しながら増えてきているようです。
上記には含めていませんが、Poster sessionがある年もあり、今年度もCall for late breaking resultsとして、1ページの概要のみでの投稿が募集されていました。それらも含め、現地対面開催だったおかげか、今年は非常に盛況で京都の街がIROS関連の方で溢れ返っていたようです。なお、ロボット分野は日本の貢献が他の計算機科学分野などと比べても大きく、毎年コンスタントに全投稿数の10%以上が日本からの投稿となっています。
*参考:
トップカンファレンスでの日本人著者が関連する論文の採択率
CVPR3.34%、ICML1.84%、SIGGRAPH5.78%
(出展:ResearchPortトップカンファレンス定点観測シリーズより)
■日本人研究者別-論文採択数
さらに解析を進め、過去6年間での累積論文数(5件に以上)の個人別ランキングを出してみました(図2)。上位からロボット分野で著名な先生方が並んでおります。
トップは東京大学JSKの先生方です。稲葉雅幸氏82件・岡田慧氏79件は、3位以下の方々に倍以上の差をつけ圧倒的な投稿数となっておりました。これだけの論文数を出そうとすると、毎年平均して10件以上出さなくてはなりませんので、その凄まじさが分かるかと思います。
他には、早稲田大学 菅野重樹氏、同大学 尾形哲也氏、豊橋技術科学大学 垣内洋平氏、大阪大学 原田研介氏、同大学 石黒浩氏、東北大学 田所諭氏などのロボット領域では超有名な先生方のお名前が見てとれます。
このように日本が技術立国として、大きな一角を示していることを改めて思い知らされました。
publication ranking
| 著者 | 採択数 |
|---|---|
| Masayuki Inaba |
82
|
| Kei Okada |
79
|
| Masayoshi Tomizuka |
37
|
| Shigeki Sugano |
28
|
| Yohei Kakiuchi |
24
|
| Kensuke Harada |
19
|
| Satoshi Tadokoro |
19
|
| Hiroshi Ishiguro |
18
|
| Yuki Asano |
17
|
| Fumihito Sugai |
16
|
| Kunio Kojima |
15
|
| Kenjiro Tadakuma |
14
|
| Koji Kawasaki |
13
|
| Toshio Fukuda |
12
|
| Fumio Kanehiro |
12
|
| Tetsuya Ogata |
12
|
| Fumihito Arai |
11
|
| Masashi Konyo |
11
|
| Yuta Kojio |
11
|
| Shunichi Nozawa |
10
|
| Takamitsu Matsubara |
10
|
| Yasuhisa Hirata |
10
|
| Mitsuharu Morisawa |
10
|
| Moritaka Onitsuka |
10
|
| Taro Nakamura |
9
|
| Koichi Suzumori |
9
|
| Gen Endo |
9
|
| Toshiaki Tsuji |
9
|
| Tadahiro Taniguchi |
9
|
| Masaki Murooka |
9
|
| Kyohei Otsu |
9
|
| Kei Tsuzuki |
9
|
| Kazuhiro Nakadai |
8
|
| Yoshihiko Nakamura |
8
|
| Kazunori Ohno |
8
|
| Masahiro Watanabe |
8
|
| Kazutoshi Tanaka |
8
|
| Yasunori Toshimitsu |
8
|
| Tetsuyou Watanabe |
7
|
| Shogo Makino |
7
|
| Kenji Suzuki |
7
|
| Sho Sakaino |
7
|
| Katsu Yamane |
7
|
| Fumiya Iida |
7
|
| Fumihiko Asano |
7
|
| Yuya Nagamatsu |
7
|
| Koh Hosoda |
7
|
| Yasuhisa Hasegawa |
6
|
| Tokuo Tsuji |
6
|
| Mitsuhiro Kamezaki |
6
|
| Kenji Shimada |
6
|
| Tomoaki Mashimo |
6
|
| Kenji Hashimoto |
6
|
| Eiichi Yoshida |
6
|
| Hidenobu Sumioka |
6
|
| Ryuma Niiyama |
6
|
| Komei Sugiura |
6
|
| Keisuke Koyama |
6
|
| Yuichiro Yoshikawa |
6
|
| Takuya Umedachi |
6
|
| Kenji Koide |
6
|
| Yasuyuki Yamada |
5
|
| Masaya Kawamura |
5
|
| Takeshi Takaki |
5
|
| Idaku Ishii |
5
|
| Yosuke Suzuki |
5
|
| Jun Morimoto |
5
|
| Hiromi Mochiyama |
5
|
| Makoto Kumon |
5
|
| Shinichi Hirai |
5
|
| Kunihiro Ogata |
5
|
| Tatsuya Harada |
5
|
| Masaki Takahashi |
5
|
| Yosuke Ikegami |
5
|
| Tomoaki Nakamura |
5
|
| Takayuki Nagai |
5
|
| Isao Tokuda |
5
|
| Shuji Oishi |
5
|
| Masahiro Shiomi |
5
|
| Shintaro Noda |
5
|
| Shotaro Kojima |
5
|
| Satoshi Nishikawa |
5
|
| Shuhei Ikemoto |
5
|
| Ko Yamamoto |
5
|
| Iori Kumagai |
5
|
| Satomi Sugaya |
5
|
| Yoshito Okada |
5
|
| Yuya Koga |
5
|
| Masashi Hamaya |
5
|
| Yuki Shirai |
5
|
| Junya Nakanishi |
5
|
図2 過去6年間の論文投稿数ランキング
一方で、ほとんどの論文が大学からのものであり、企業からの投稿数は限定的です。これは国内のみならず、世界的に見ても同様であり、トップクラスのロボットメーカーである、ABB / KUKA / YASKAWA / FANUC / Kawasaki / DENSO / Mitsubishi / YAMAHA / EPSON / CANON / Panasonic / OMRON / KAWADA / Hirata / Universal robots / Rethink robotics / Mujin / DJI / Softbank / Boston dynamics / …… などの企業からもそれほど多く出ているわけではありません。他AI分野などと比べれば、産学の分断が大きいことがわかります。
ロボットの製品化においては、ときに人命に関わることもあり、かなりの完成度が求められます。対して、学術界で提案されるロボットは、ある種コンセプト的であり完成度の観点ではさらに数段あげなければならない状態であることから、活動しているフェーズが違うことも影響しているかもしれません。今後の考察で、そのような状態も可視化できるようにしていきたいと思います。
■まとめ
今回は、今年度日本国内で開催されたIROS2022にちなんで、ロボット業界初の定点観測シリーズを進めてみました。その結果、AI研究と融合しつつあり、今まで以上にさらに新たな意味で興味深い分野になってきている様子が見て取れました。これからも、人々の重労働を代替し、身の回りを便利にしてくれる”ロボット”の登場が見込まれますし、日本からの活躍も期待されますので、興味深く見守っていきたいと思います。
編集:ResearchPort事業部
■Contact
本記事に関する質問や、ご意見・ご要望などがございましたらResearchPortまでお問い合わせください。
https://research-p.com/contactform/
-
2026年4月23日
「ICLR 2026」ResearchPortトップカンファレンス定点観測 vol.21


